Les moteurs électriques à courant alternatif
Retour
Sommaire
|
Rares sont les physiciens qui ont donné leur nom à
une unité. C'est le cas de
Nikola Tesla (1856-1943)
Très en avance sur son
temps Nikola Tesla a eu un peu de mal à convaincre ses contemporains. Mais comme
le dit si bien B.A. Behrend, président du American Institute of Electrical
Engineers : « Si nous devions saisir et éliminer de notre monde industriel
les résultats des travaux de monsieur Tesla, les roues de l’industrie
s’arrêteraient, les trains seraient immobilisés, nos villes seraient jetées dans
la pénombre et nos usines seraient mortes […] Son nom marque une époque dans
l’avancement de la science électrique. De ce travail jaillit une révolution…
»
L'invention du courant alternatif et du moteur
asynchrone sont 2 des 700 inventions du physicien serbe.
|
|
Présentation :
|
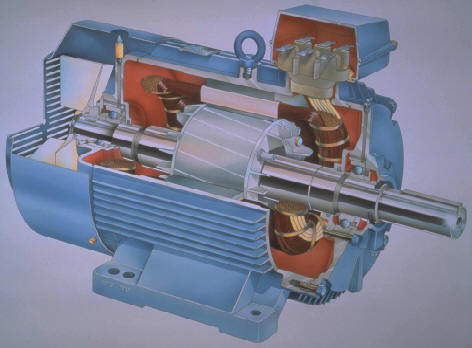 |
C'est un moteur qui se caractérise par le fait qu'il est constitué d'un
stator (inducteur) alimenté en courant alternatif et d'un rotor (induit) soit en
court-circuit, soit bobiné aboutissant à des bagues dans lesquelles le courant
est créé par induction. Ces moteurs ont la particularité de fonctionner grâce à
un champ tournant. |
On distingue 2 catégories de moteur asynchrones en fonction
du type de rotor :
- les moteurs asynchrones à rotor en court-circuit, de
faible puissance.
- les moteurs asynchrones à rotor bobiné à bagues
dans lesquelles l'enroulement du rotor aboutit à des bagues par
l'intermédiaire desquelles on peut insérer des résistances. Ils sont de
grande puissance.
Les moteurs asynchrones peuvent démarrer par leurs propres
moyens s'ils sont polyphasés. Le couple de démarrage des moteurs asynchrones
est faible.
C'est un moteur dont la vitesse est
proportionnelle à la fréquence du courant :
n = fréquence de rotation
f = fréquence du courant
p = nombre de paire de pôles
Précautions de câblage :
Pour le pilotage de ces moteurs, il est impératif de
séparer la tension de commande de la tension de puissance. La tension de
commande doit être en très basse tension 24 Volts puisqu'un opérateur
humain sera amené à intervenir et la tension de puissance sera en basse
tension 380 V. Il sera donc nécessaire de différencier physiquement sur un
circuit, ces deux tensions.
Schématisation :
Alimentation d'un moteur asynchrone :
|
 |
 |
|
Diagramme de Fresnel |
Courbes de tensions triphasées |
Vérification de la tension entre deux phases :
|
Démarrage
direct d'un moteur triphasé par disjoncteur-moteur
Commande locale (uniquement)
L'appareil assure la commande manuelle locale, protège contre
les courts-circuits et les surcharges.
Protections assurées
Par un déclencheur magnéto-thermique tripolaire, incorporé
à l'appareil, contre les courts-circuits (éléments magnétiques),
contre les surcharges faibles et prolongées (éléments thermiques).
En option, un additif limiteur branché en série avec les
pôles du disjoncteur-moteur permet d'augmenter le pouvoir de coupure de
l'appareil.
|
|
|
Démarrage
direct d'un moteur monophasé par discontacteur avec interrupteur
|
|
Commande locale
L'association d'un interrupteur, d'un contacteur et d'un relais
de protection thermique dans un coffret, autorise la coupure en charge
et protège contre les surcharges.
Conformément aux normes d'installations en vigueur, chaque
départ doit être protégé contre les courts-circuits par des fusibles
ou un disjoncteur placés en amont.
Protections assurées
Par un relais tripolaire de protection thermique contre les
surcharges faibles et prolongées.
Verrouillage de l'ouverture du coffret si l'interrupteur n'est
pas ouvert.
Fonctionnement du circuit de puissance
Fermeture manuelle de l'interrupteur Q1
Fermeture de KM1.
Q1 : calibre In moteur.
KM1 : calibre In moteur en fonction de la catégorie d'emploi.
F1 : calibre In moteur.
Fonctionnement du circuit de commande
Impulsion sur marche.
Fermeture de KM1.
Auto-alimentation de KMI.
Arrêt : impulsion sur 0, ou par déclenchement du relais de
protection thermique FI.
|

|
|
Protection électromagnétique
Par relais à maximum de courant
Protection des installations soumises à des pointes de
courant fréquentes et importantes.
Raccordement du circuit de puissance
Insérer dans chaque phase ou fil d'alimentation, un relais
électromagnétique.
Fonctionnement du circuit de commande (schéma):
Commande 2 fils (sans auto-alimentation).
KM1 fermé.
Pointe de courant importante.
Déclenchement de F2, F3 ou F4.
Ouverture de KM1 par F2, F3 ou F4.
Rétablissement instantané du contact du ou des relais
déclenchés.
Fermeture de KM1 après impulsion sur le bouton-poussoir marche.
|

|
 
Définition Le sectionneur est un appareil mécanique de connexion capable d'ouvrir et de
fermer un circuit lorsque le courant est nul ou pratiquement nul afin d'isoler la partie de l'installation en aval du sectionneur.
- Le sectionneur n'a pas de pouvoir de coupure ou de fermeture.
- La coupure doit être visible soit directement par observation de la séparation des contacts, soit par un indicateur de
position si les contacts ne sont pas visibles.
- Le sectionneur peut-être verrouillable par un cadenas en position ouvert. C'est une sécurité sur un circuit des personnes qui
travaillent en aval du sectionneur
|
Dénomination d'un sectionneur
|
Symboles
- Nombre de pôles.
- Valeur de la tension.
- Courant nominal.
- Contacts auxiliaires.
- Nature de la commande.
- Système de fixation.
|
 |
Rôle des différents organes
- Les contacts principaux permettent d'assurer le
sectionnement de l'installation, c'est une fonction de sécurité obligatoire.
- Les contacts auxiliaires permettent de couper le circuit de
commande des contacteurs avant l'ouverture des pôles du sectionneur ce qui
évite la coupure en charge. De même à la mise sous tension, le circuit de
commande n'est fermé qu'après la fermeture des pôles du sectionneur.
|
- La poignée de commande peut être verrouillée en
position ouverte par un cadenas (sécurité opérateur pour la
maintenance).
Le sectionneur avec fusibles et contacts auxiliaires
offre la possibilité, en enlevant les cartouches fusibles et par
fermeture du sectionneur, d'alimenter uniquement le circuit de commande et
ainsi de pouvoir tester un équipement automatique sans risque au niveau
des organes de puissance. En effet, les organes de puissance n'étant pas
alimentés, il est possible de simuler un cycle de fonctionnement d'un
système automatique.
|

|
- Q est un contact qui est lié directement au
sectionneur porte-fusible. Si celui-ci est ouvert il n'y aura pas
d'alimentation du circuit de commande.
- Arrêt est un contact qui permet l'arrêt du moteur.
- F est un contact à ouverture qui se déclenche si le
moteur subit une trop forte intensité.
- bp1 et bp2 sont les boutons poussoir à fermeture qui
vont permettre le pilotage du moteur dans un sens ou dans l'autre.
- km1 et km2 sont des contacts à fermeture liés aux
deux contacteurs. On utilise aussi des contacts à ouverture qui
empêcheront la possibilité d'avoir une commande de rotation du moteur
dans les deux sens. L' inversion du sens de rotation est obtenu en
croisant deux des conducteurs de phase d'alimentation, le troisième
restant inchangé. On inverse ainsi le sens du champ tournant et par
conséquent, le sens de rotation du moteur. Pour plus de sécurité une
liaison mécanique lie les deux contacteurs empêchant ainsi tout risque
de manoeuvre malencontreuse.
Inversion du sens de marche :
L'inversion du sens de marche est obtenu en croisant deux des conducteur
de phase d'alimentation, le troisième restant inchangé. On inverse ainsi
le sens du champ tournant , et, par conséquent, le sens de rotation. Un
verrouillage mécanique est nécessaire pour éviter le court circuit entre
les deux phases dans le cas où les contacteurs KM1 et KM2 seraient
fermés ensemble. Un verrouillage électrique par les contact KM1 et KM2
permet de compléter le verrouillage mécanique dans le cas où ce dernier
serait défaillant.
Conclusion :
Avantages :
simplicité de l'appareillage.
couple important.
temps de démarrage minimal pour un moteur à cage.
Inconvénients :
Appel de courant très important Intensité de
Démarrage = 4 à 8 Intensité Nominale.
Démarrage brutal.
Emplois :
Moteur de petite puissance.
Machine ne nécessitant pas une mise en vitesse
progressive.
Machine nécessitant un bon couple de démarrage.
Définition :
Un fusible est un appareil de connexion dont la fonction
est d'ouvrir par fusion d'un ou de plusieurs de ses éléments conçus et
calibrés à cet effet le circuit dans lequel il est inséré et
d'interrompre le courant lorsque celui-ci dépasse, pendant un temps
suffisant, une valeur précisée.
|
Symboles : |
Structure |
|
 |
 |
Différentes classes de fusibles :
Selon l'utilisation on choisira entre 3 classes
d'éléments de remplacement.
Classe gI : fusible d'usage
général. Ils protègent contre les surcharges et les courts-circuits. Ce
sont les fusibles d'usage général (g).
Classe gII : fusible d'usage général temporisé dont le temps de fusion est
retardé.
Classe aM : Accompagnement moteur : ces fusibles sont prévus uniquement pour
la protection contre les court-circuits. Ils sont surtout prévus pour la
protection des moteur à courant alternatif. La protection contre les
surcharges doit être assurée par un autre dispositif tel que relais
thermique par exemple. Ces fusibles sont de couleur verte
Caractéristiques des fusibles :
Tension nominale : 250, 400, 500, 660V.
Courant nominal (In) : c'est le calibre du fusible ou de la cartouche de remplacement .
Courant de non fusion (Inf) : c'est la valeur du courant qui peut être supporté par
l'élément fusible pendant un temps conventionnel sans fondre.
Courant de fusion (If) : c'est la valeur du courant qui provoque la fusion du fusible
avant la fin du temps conventionnel.
Durée de coupure : c'est le temps qui s'écoule entre le moment où commence à circuler
un courant suffisant pour provoquer la fusion et la fin de fusion.
Courbe de fonctionnement d'un fusible : on exprime le temps de fusion en
fonction de l'intensité, ce qui se traduit par deux courbes
L'intérêt du contacteur est de pouvoir être commandé
à distance au moyen de contacts, peu encombrants et sensibles, actionnés
manuellement ou automatiquement.
Définition :
Le contacteur est un appareil mécanique de connexion
ayant une seule position repos, commandé autrement qu'à la main, capable
d'établir, de supporter et d'interrompre des courants dans les conditions
normales du circuit, y compris les conditions de surcharge en service.
Un contacteur dont les contacts principaux sont fermés
dans la position de repos est appelé rupteur.
|
Constitution générale : Contacteur à translation :

|
Différents organes :
Les pôles ou contacts principaux (contacts fixes et mobiles)
Les pôles sont les éléments de contacts qui permettent
d'établir et d'interrompre le courant principal.
Le pôle est défini par les valeurs nominales de courant
et de tension qui définissent en partie le contacteur. On utilise des
contacteur à soufflage magnétique pour les circuit ayant des intensités de
200 à 3000 A. Le soufflage de l'arc électrique a pour but d'éviter l'usure
prématurée des contacts par électro-érosion.
organe de manœuvre : électro-aimant
|
Le circuit magnétique de ce type d'électro-aimant est
feuilleté de manière à réduire les pertes par courant de Foucault dus
à la présence d'un flux alternatif.
Lorsque l'électro-aimant est ouvert, la réluctance du
circuit magnétique est élevée ce qui revient à dire que la réactance
de sa bobine est faible. Il en résulte, dans ces conditions, un appel de
courant très supérieur au courant permanent que consomme la bobine à
circuit magnétique fermé.
L'intensité, à circuit magnétique ouvert, peut atteindre 6 à 10
fois celle du circuit fermé pendant une fraction de seconde.
L'électro-aimant peut être alimenté en courant continu ce qui permet
d'avoir une plus grande force d'attraction.
|

|
Principe de fonctionnement :
|
Le relais thermique utilise la propriété
d'un bilame formé de deux lames minces de métaux ayant des coefficients
de dilatation différents. Il s'incurve lorsque sa température augmente.
Pour ce bilame on utilise un alliage ferro-nickel.
|

|
|
Chaque relais comprend trois bilames constitués chacun de deux métaux
dont le coefficient de dilatation est différent. Un enroulement
chauffant est raccordé en série sur chacune des phases avec une section
adaptée à l’intensité à surveiller. Lors d’un incident, le courant
absorbé par le récepteur augmente, les bilames se déforment et
actionnent un mécanisme pour manœuvrer les contacts. Le contact inséré
dans le circuit de commande du contacteur provoque la mise hors tension
du récepteur. Ils sont munis d’un système de réarment qui peut
s’effectuer lorsque les bilames sont suffisamment refroidis. Certains
relais thermique possèdent un réarment automatique qui permet la remise
en service du récepteur lorsque les bilames sont froids, système
déconseillé par sécurité pour les utilisateurs, redémarrage automatique
et pour les récepteurs risque de dégradation. |
|
Position à froid |

Position en fonctionnement |
Déclanchement
|
|
Le relais
thermique, permet de protéger un récepteur contre les surcharges faibles
et prolongées. Il permet de protéger efficacement contre les incidents
d'origines mécanique, chute de tension, déséquilibre des phases, manque
d'une phase. Le relais thermique est utilisable en courant continu et
alternatif, les relais thermiques sont généralement tripolaires.
Les relais thermiques sont utilisables en courant
triphasé, courant continu, courant monophasé et diphasé. Ils sont
insensibles à la variation de la température ambiante, les bilames sont
compensées. Les bilames de compensation sont soumis à la température de
l’air ambiant ils se déforment de façon opposés aux bilames principaux.
Ils sont capables de déceler un manque de phase, un déséquilibre sur les
phases. Le système différentiel permet de contrôler si le courant qui
traverse les bilames est identique sur les trois circuits (manque de
phases, fusion d’un fusible, déséquilibre). Les relais thermiques
doivent être associés à un contacteur et à des fusibles. La plage de
réglage est affichée en ampères-moteur, le réglage doit correspondre et
cela sans compensation à l’intensité plaquée sur le moteur. |
Relais thermique :
|

|
|
Courbe de déclenchement :
C'est la courbe représentant le
temps de déclenchement en fonction des multiples de l'intensité de
réglage. L'intensité minimale de déclenchement est égale, en général, à
1.15 fois l'intensité de réglage
|

|
Choix d'un relais thermique :
Lorsqu'un contacteur est muni d'un relais thermique,
l'ensemble constitue un discontacteur. Le contacteur n'est pas apte à couper
des courant de court-circuit, il doit être associé à des fusible du type aM
qui interviennent au-delà du pouvoir de coupure du contacteur. On peut tracer
sur un même graphique le courbe de déclenchement temps/intensité du relais
thermique et de la courbe de fusion du fusible. A l'intersection des des courbes
on a le pouvoir de coupure limite du contacteur.

|