|
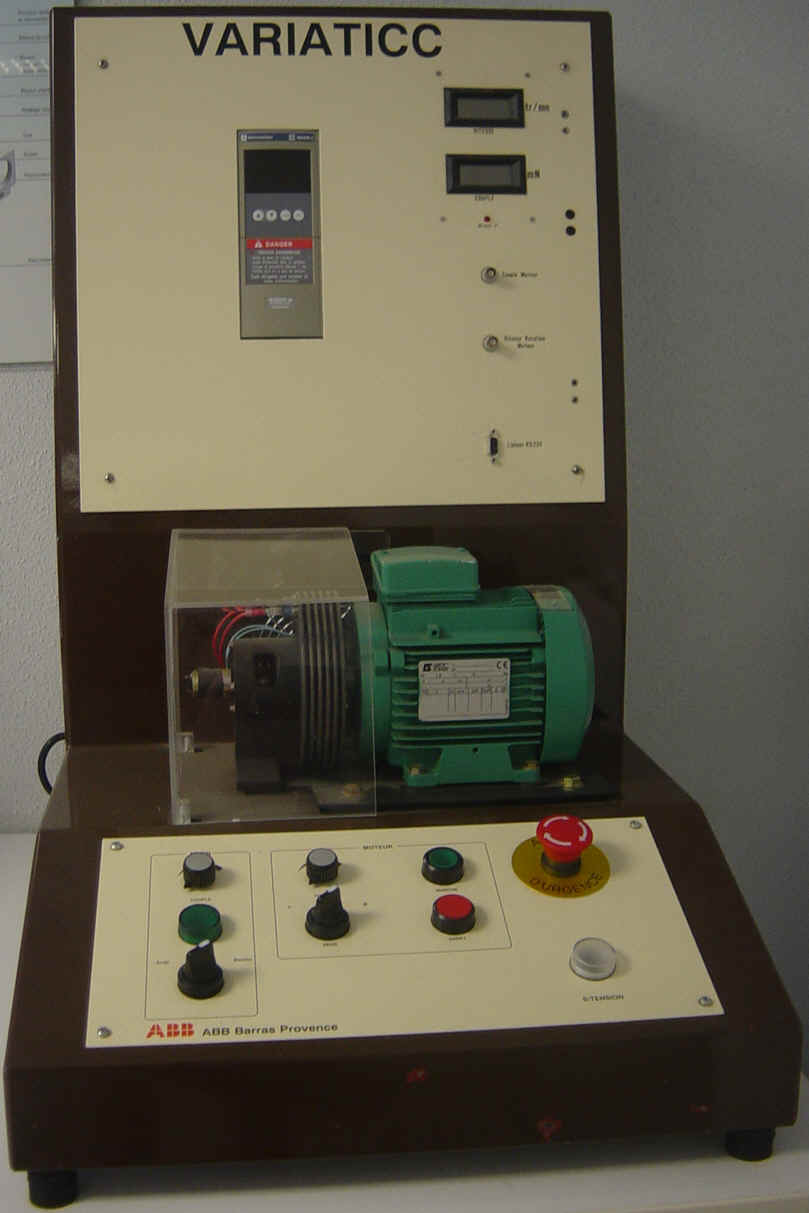
Variation de vitesse d'un moteur asynchrone
Un moteur asynchrone étant choisi à partir de caractéristiques techniques connues, les documentations techniques étant fournies, vous devez définir les fonctions des constituants de la ligne de distribution du moteur, analyser et caractériser les principes physiques qui concourent à cette variation de vitesse, identifier le mode de transmission des données.
Le travail que vous effectuerez ne fera pas l'objet d'un compte-rendu.
Démarrage
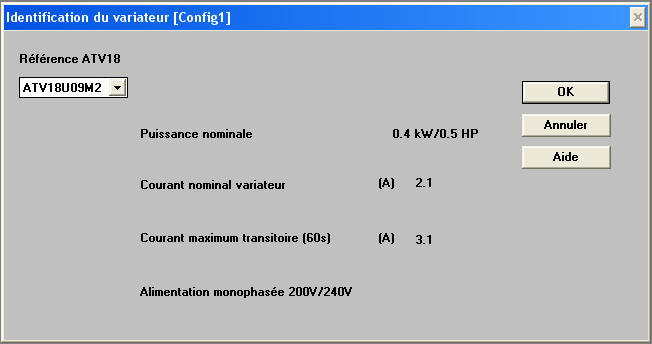
Au démarrage du logiciel ATV18 <Identification du variateur>
Choisir ATV18U09M2 <OK>
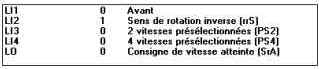
2 - Sous-menu "Fonctions spécifiques " (Rien à régler)
Permet de visualiser les paramètres de rotation
Déroulement du TP :
Faites tourner le moteur à 1600 tours par minute. Réglez le variateur pour qu'il accélère pendant 2 secondes de 0 jusqu'à 1500 tours. Le freinage s'effectuera en roue libre (réglez 20 secondes dans un premier temps). Réglez le variateur pour qu'il accélère pendant 10 secondes de 0 jusqu'à 1200 tours. Le freinage s'effectuera en 1.2 secondes.
Quelle est la puissance utile du moteur ?
On se propose de définir le pourcentage de glissement du rotor du moteur asynchrone par rapport au champ tournant du stator. Le moteur utilisé est un moteur asynchrone tétrapolaire, il comporte 4 pôles soit 2 paires de pôles, donc p = 2. En utilisant la formule suivante et en faisant attention aux unités
calculez la fréquence de rotation théorique du moteur pour une fréquence d'alimentation de 50 Hz. Relevez la fréquence de rotation réelle n du moteur pour une fréquence d'alimentation de 50 Hz. Le glissement s'obtient par la formule :
Calculez le glissement à 50 Hz. Après avoir défini la nature des efforts en jeu pour permettre la rotation du moteur, expliquez à quoi correspond le glissement ?
Réglez le frein pour que le couple fourni par le moteur soit de 2.5 mN pour une fréquence d'alimentation de 50 Hz. Calculez la puissance utile du moteur à l'aide de la formule suivante : Pu = T . Ώ où T est le couple (Torque en anglais) et où Ώ est la fréquence de rotation du moteur en radians par seconde.
On admet que le rendement du moteur est de η = 95%. Réglez le frein pour que le couple fourni par le moteur soit de 2.5 mN pour une fréquence d'alimentation de 50 Hz. Relevez, à l'aide de l'ordinateur, l'intensité efficace (I) du courant en ligne ainsi que la tension efficace (U) entre phases. Calculez la puissance absorbée par le moteur.
Le moteur est freiné par injection de courant continu. Expliquez comment le moteur s'arrête. Le bruit émis est caractéristique du freinage d'un moteur par injection de courant continu. Connaissez-vous ce bruit ? Où l'avez-vous déjà entendu ?
Pour une fréquence d'alimentation de 42 Hz, faire varier le couple de freinage et relever la variation d'intensité, que constate-t-on ?
La transmission de données utilisée entre le variateur et le micro-ordinateur se fait par une li aison série. Qu'est-ce que cela veut dire ?
|